approaches commonly rely on either pose-graph optimiza-
tion (Kümmerle
et al.
2011) or bundle adjustment (Lourakis
and Argyros 2009) to minimize reprojection errors across
frames. Dai
et al.
(2017) proposed a method called BundleFu-
sion, in which a bundle adjustment (
BA
) from local to global
was carried out and a sparse-to-dense alignment strategy was
implemented to generate a dense 3D model from a coarse
one. However, the previously mentioned
SLAM
developments
have been most frequently considered in computer vision
applications, and few studies have applied the
RGB-D
SLAM
to 3D mapping applications, mainly because of their limited
measuring scopes and lower data quality. Steinbrucker
et al.
(2013) proposed a large-scale multiresolution method to gen-
erate indoor mapping reconstruction from
RGB-D
sequences.
Chow
et al.
(2014) introduced a mapping system that inte-
grated a mobile 3D light detection and ranging system with
two Kinect sensors and an inertial measurement unit to map
indoor environments. Tang
et al.
(2016) carried out precise
calibration of the
RGB-D
sensor to ac
ping. However, these improvements
and were not related to measuring s
improve the feasibility and practica
sors, the measuring scope should be
Our work fills this gap.
The
SfM
method is an image-based algorithm used to
estimate the camera poses, scene geometry, and orientation
from
RGB
sequences (Snavely
et al.
2008; Westoby
et al.
2012).
In
SfM
, these estimations are solved simultaneously using
a highly redundant iterative
BA
procedure based on a set of
features that are automatically extracted from a set of mul-
tiple overlapping images (Snavely 2008). Because
SfM
does
not rely on depth information from sensors, the valid range
is typically greater than that of
RGB-D
sensors. A variety of
SfM
strategies have been proposed, including incremental (Frahm
et al.
2010), hierarchical (Gherardi
et al.
2010), and global ap-
proaches (Crandall
et al.
2011). Moreover, many well-known
open-source programs, such as VisualSfM (Wu 2011), Bundle
(Snavely
et al.
2006), and
COLMAP
(Schonberger and Frahm
2016), can be used to implement
SfM
and
MVS
. However, in
addition to requiring the input images to have extreme over-
lapping regions in the stereo pairs,
SfM
must contain enriched
textures in these regions to ensure the quality of the geometry
structures. Moreover, a 3D visual model from
SfM
is scale-free
and cannot be used directly on mapping issues.
Recent advances in deep learning have provided promising
results for resolution of the related issues. Such innovations
include the SE3-Nets (Byravan and Fox 2017), 3D image inter-
preter (Wu
et al.
2016), depth convolutional neural network
(CNN) (Garg
et al.
2016), and
SfM
-Nets (Vijayanarasimhan
et al.
2017). Although the robustness of
SfM
and the quality
of the results have been improved by those state-of-the-art
approaches, a gap remains to obtaining further mapping
properties. To carry out a deep learning method, we require a
large number of samples for training and a highly configured
device (LeCun
et al.
2015). To account for the properties of
offline computing, we introduce additional depth information
from the
SLAM
results into the
BA
to improve
SfM
. We then
carry out a scale-adaptive registration to merge the point
clouds from the depth sensor in short ranges and from the
RGB
image sequences in distant ranges to generate enhanced and
extended 3D models.
Enhanced 3D Mapping by Integrating Depth Measurements and
Image Sequences
Overview of the Proposed Approach
A calibration process must be carried out on the
RGB-D
sen-
sor before starting the 3D mapping tasks. We implemented a
precise calibration (Tang
et al.
2016) on the
RGB-D
sensor to
determine the precise spatial relationship between the
RGB
and
IR
(depth) cameras. We carried out the state-of-the-art
online
SLAM
method—i.e., BundleFusion (Dai
et al.
2017)—to
generate dense 3D mapping results in short ranges using a
commodity depth sensor. We then introduced the information
, point-to-pixel) into the
SfM
system
r and Frahm 2016) to carry out con-
scale is imported in the improved
epth constraints, distortions may
occur during the
SfM
and
MVS
. Therefore, we further imple-
mented scale-adaptive registration on those two-point clouds
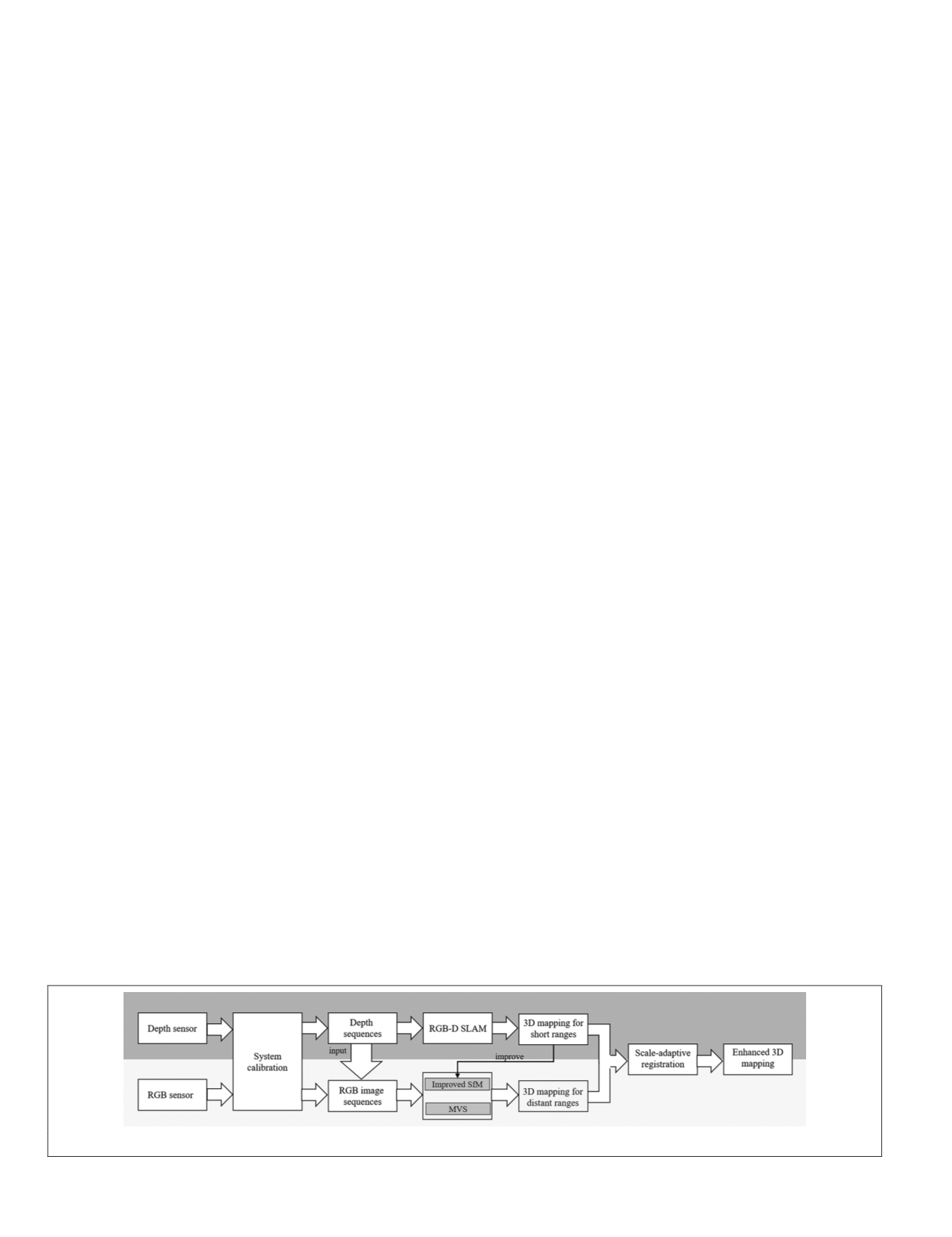
to generate enhanced and extended 3D mapping results. Fig-
ure 1 shows an overview of the proposed approach.
3D Mapping from the RGB-D Sensor in Short Ranges
The BundleFusion (Dai
et al.
2017) was used for
SLAM
and
3D mapping in short ranges in our approach. The main dif-
ference between the BundleFusion and other approaches
is that the former is a fully parallelizable sparse-to-dense
global pose optimization framework. Sparse
RGB
features are
detected by the scale-invariant feature transform (
SIFT
) detec-
tor (Lo and Siebert 2009; Wu
et al.
2012), and then sparse
correspondences are carefully established between the input
frames, and then used to carry out a coarse global alignment.
Mismatches are detected and removed to avoid false loop
closures between all input frames. That is, detected keypoints
are matched against all previous frames and carefully filtered
to remove mismatches. After that, the coarse alignment is
refined by optimizing for dense photometric and geometric
consistency. We implement a hierarchical local-to-global
strategy to optimize the camera tracking and orientations. On
the first hierarchy level,
n
continuous frames (e.g.,
n
= 10)
compose a chunk, and in each chunk a keyframe is defined
and then other frames in the chunk are matched to the key-
frame. Based on this, the program executes a local
BA
. On the
second hierarchy level, all of the chunks are collected and
the algorithm implements a global
BA
. The coarse global pose
optimization ensures that the subsequent fine alignments can
converge to a promising solution. In the fine global optimiza-
tion step, the program also implements the same hierarchical
strategy as that used in the coarse step. After executing the
SLAM
program, a dense 3D mapping can be obtained.
Figure 1. Workflow of the proposed approach.
634
September 2019
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


