The evaluation protocol is defined in great detail by Balntas
et al.
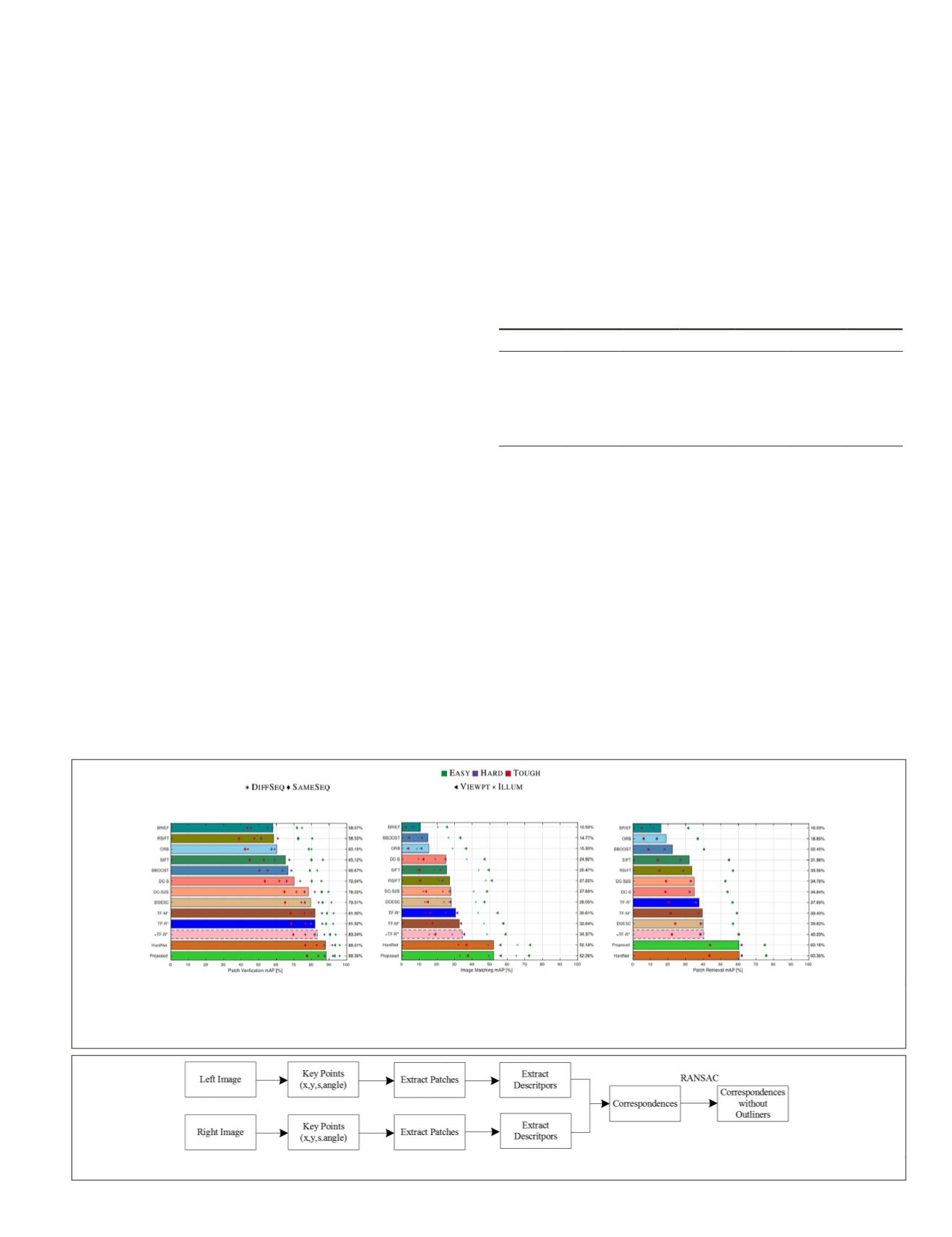
(2017). As shown in Figure 6, the proposed
PPD
descrip-
tor has the top performance among all handcrafted and deep
descriptors in the verification, matching, and retrieval tasks,
except slightly lower than HardNet in the retrieval task.
Except for the HardNet approach, the proposed
PPD
descrip-
tor outperforms other descriptors by a large margin in image
matching and patch retrieval tasks.
Real Data Set
Although the proposed descriptor
PPD
has achieved top
performance on the two benchmarks mentioned above, it
needs to be shown that it can be applied to feature matching
in a real aerial image data set. In this section, we use pairs of
aerial images to test the performance of the learned descrip-
tor. In addition, we also test the effectiveness of the proposed
descriptor in two extreme cases, including illumination and
viewpoint changes.
Figure 7 shows the workflow of obtaining correspon-
dences from two images. First, the i
key point location (
x,y
), scale
s
, and
detected using a number of feature
tection algorithm. Then rectified im
from the regions around the interest points according to the
scale
s
. The rectified image patch Patch
′
can be obtained from
the original image patch according to the angle
θ
:
Patch =Patch
cos sin
sin cos
′
⋅
=
⋅
−
Rot Patch
θ
θ
θ
θ
(12)
Following this simple rectification, the descriptors of the
interest points are detected using the proposed
PPD
descriptor.
We find corresponding features by comparing the distances
between the descriptors using either Hamming distance or L2
distance.
By comparing the distances between two descriptors, the
correspondence of a given key point can be found when the
ratio between the shortest distance and the second-shortest
distance is smaller than a given threshold. Since the initial
correspondences usually contain incorrect matches, the
RANSAC algorithm is used to remove the outliers from the
correspondences.
Point Matching for Aerial Images
Three aerial image pairs with a resolution of 2000×1498 pix-
els captured by a Phase One aerial camera in Wuhan, China,
are used to evaluate the performance of the proposed
PPD
descriptor. Those images are ultra-high-resolution aerial im-
ages that cover a different type of objects, including buildings,
vegetation, and roads. Table 4 shows detailed information on
the interest points extracted in the three image pairs by the
BRISK
(Leutenegger
et al.
2011),
SIFT
,
ORB
,
SURF
, and
AKAZE
detecting algorithms.
Table 4. The basic information of the patches (i.e., the number
of key points) in the aerial image data set using different
feature detectors including BRISK, SIFT, ORB, SURF and
AKAZE. −L and −R represent the left and right image in that
image pair, respectively.
Algorithm Pair1-L Pair1-R Pair2-L Pair2-R Pair3-L Pair3-R
BRISK 80 737 80 320 87 846 82 228 76 303 84 040
35 458 29 317 29 828 32 050
80 000 80 000 79 603 80 000
39 089 39 017 35 549 39 082
AKAZE 21 708 19 965 25 024 23 142 17 602 20 571
Figures 8, 9, and 10 show the linked matching points using
different detectors and descriptors in the real aerial image
data set. The number of correspondences is listed in Table 5.
We observed that the number of correspondences computed
using the learned descriptor
PPD
outperforms the learned de-
scriptor TFeat and the traditional handcrafted descriptors, in-
cluding
BRISK
,
SIFT
,
ORB
,
SURF
, and
AKAZE
. The performance of
learned descriptor TFeat is better than that of
BRISK
and
SIFT
,
similar to that of
ORB
and
AKAZE
, but worse than that of
SURF
.
All experiments indicate that the proposed
PPD
is robust and
highly discriminative no matter which detection algorithm
is used to extract the image patches. Especially in Pair1 and
Pair2, the number of correspondences extracted by proposed
descriptor
PPD
is about twice that of
SIFT
and
BRISK
.
Point Matching for Images Under Viewpoint and Illumination Variation
Feature matching is a technique widely used in remote
sensing for image registration and building 3D models of the
Figure 6. Verification, matching, and retrieval results on HPatches benchmark. The color of the marker indicates the level of
geometrical noise in three different data sets:
Easy
,
Hard
, and
Tough
. The type of the marker corresponds to a different setting
of the experiments.
DIFFSEQ
and
SAMESEQ
indicate that negative patch pairs are from different sequence and same sequence,
respectively.
VIEWPT
and
ILLUM
represent the type of sequence.
Figure 7. The workflow of obtaining correspondences from two images.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
September 2019
679


