Table 9. The basic information of the patches in the aerial image data set. KeyPoint1-B and KeyPoint2-B are the numbers of
interest points extracted from an image pair using the BRISK algorithm, while KeyPoint1-S and KeyPoint2-S use SIFT algorithm.
Camera
Resolution
KeyPoints1-B
KeyPoints2-B
KeyPoints1-S
KeyPoints2-S
Pair1
Leica RCD30
3000×2244
79 507
67 232
47 393
44 942
Pair2
Leica RCD30
3000×2244
67 232
56 685
44 942
39 684
Pair3
Leica RCD30
3000×2244
56 685
64 845
39 684
37 898
Table 10. The number of correspondences of the three image pairs using different combinations of detector and descriptors. PPD
is the proposed learned deep descriptor. Bold numbers indicate that the corresponding descriptors have the top performance.
BRISK
BRISK+TFeat
BRISK+PPD
SIFT
SIFT+TFeat
SIFT+PPD
Pair1
163
263
462
157
188
342
Pair2
91
126
198
107
127
217
Pair3
18
34
74
19
22
59
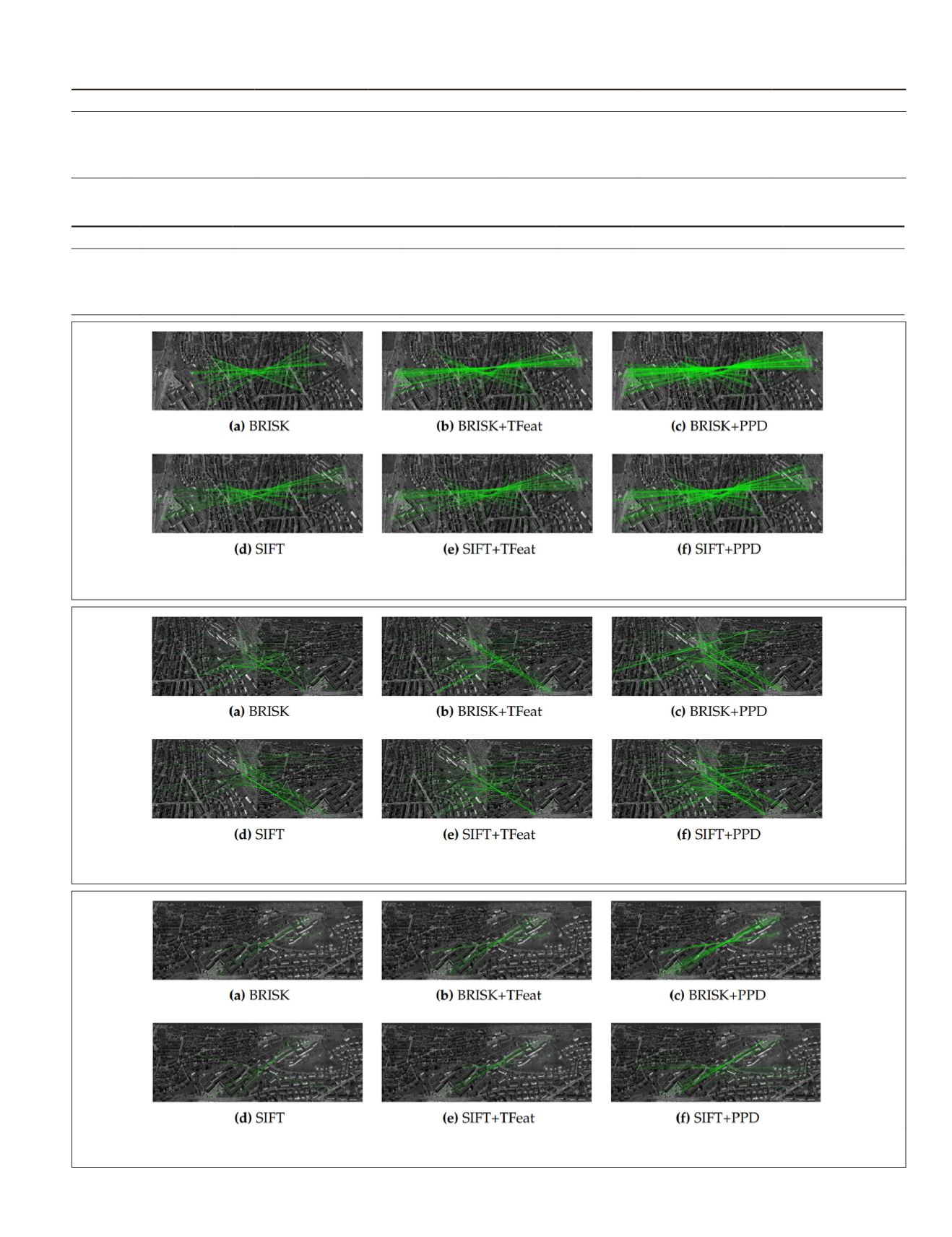
Figure 17. Feature point matching results of image pair Pair1 after outlier removal using
RANSAC
through different
combinations of different detectors and descriptors.
Figure 18. Feature point matching results of image pair Pair2 removal using
RANSAC
through different combinations of
different detectors and descriptors.
Figure 19. Feature point matching results of image pair Pair3 after outlier removal using
RANSAC
through different
combinations of different detectors and descriptors.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
September 2019
683


