of a binary problem). The multilabel problem decides, for
multiple labels, the most probable state: present (+1) or absent
(
−
1). Both the classification problem nature and the label set
are determined by the three previously defined taxonomy
parameters (Table 1).
Finesse
= 1 level corresponds to the standard binary clas-
sification problem: Valid or Erroneous. At
finesse
= 2, the
eLoD
can then take two values in the aerial reconstruction
case:
LoD
-1 or
LoD
-2. If set at
LoD
-1, it is a binary classification
problem: Valid or Building Error. For
LoD
-2, if the exclusivity
is on, it will be a multiclass problem: Valid, Building Error,
or Facet Errors. If set off, it becomes a multilabel one with the
same labels. At
inesse
= 3 level, if the exclusivity is on, it is a
two-stage classification problem. In the first stage, a multiclass
task predicts the error family, after which a second multilabel
problem decides between the predicted error family children.
If the exclusivity is off, it turns into 1-stage multilabel prob-
lem that predicts the existence of each atomic error corre-
sponding to the chosen
eLoD
.
Classifier Choice
The highly modular nature of
the framework with multimodal
features involving many param-
eters restricts the choice of clas-
sifiers. Random Forest classifiers
(Breiman 2001; Criminisi and
Shotton 2013) are selected. They
can manage a large number of
features with different dynamics
and coming from multiple mo-
dalities. Relying on their bagging
property, a high number of trees
(1000 elements) is necessary to
cover most of the feature space,
while a limited tree depth (4)
helps avoiding overfitting during
training. It adapts to any of our
classification paradigm: multi-
class or multilabel. In the latter
case, a one-versus-all approach
is adopted in addition so as to
address each label separately.
Results
Dataset
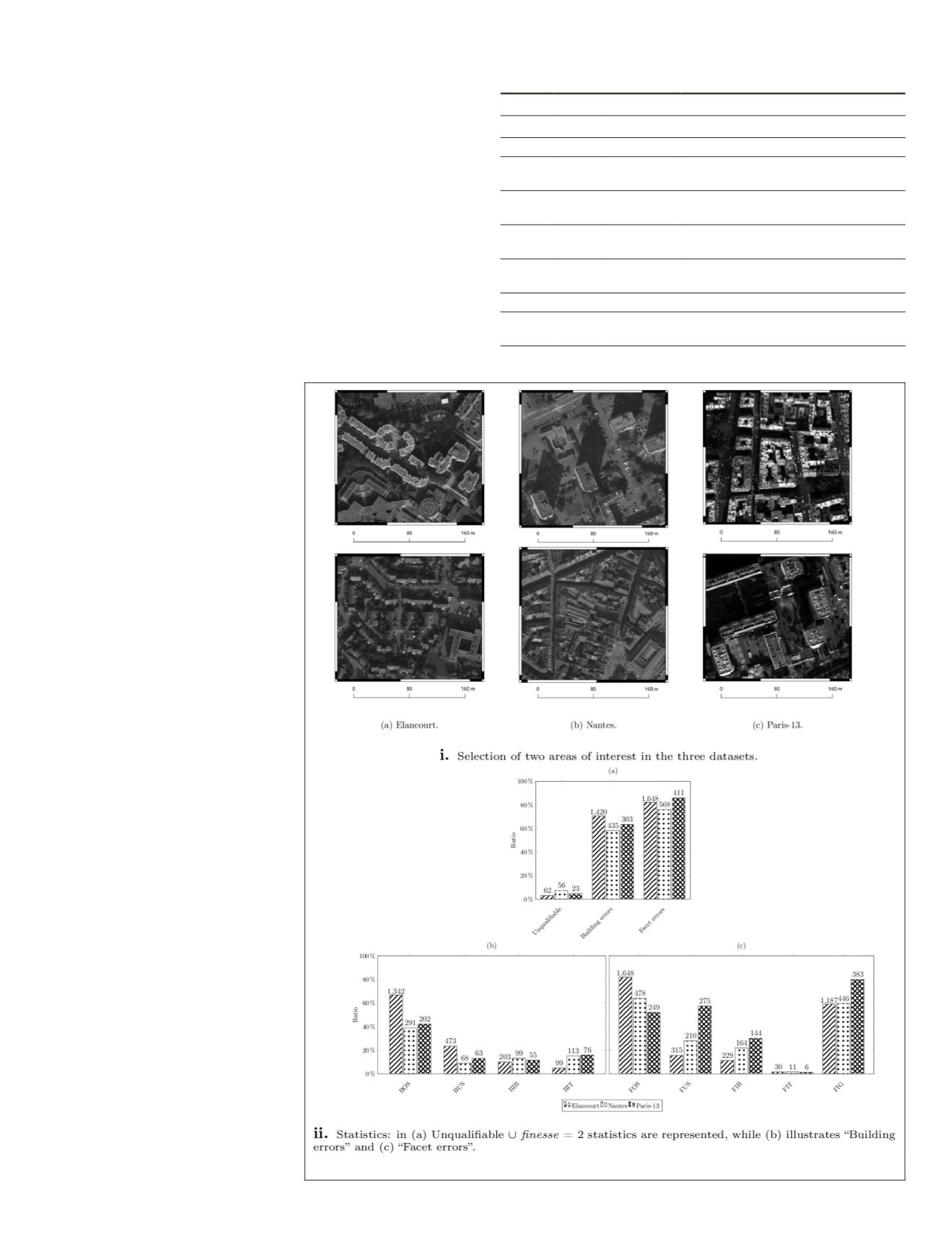
3D models from three different
cities of France are selected in
order to assess the performance
of our framework: Elancourt,
Nantes, and the XIII
th
district
of Paris (Paris-13) (Figure 6.i).
Elancourt is a small city exhibit-
ing a high diversity of building
types: residential areas (hipped
roof buildings), and industrial
districts (larger buildings with
flat roofs). Nantes represents a
denser urban setting with lower
building diversity. In Paris-13,
high towers, with flat roof, coex-
ist with Haussmann style build-
ings that typically exhibit highly
fragmented roofs. The Elancourt
(resp. Nantes and Paris-13) scene
contains 2009 (resp. 748 and
478) annotated building models.
Table 1. The summary of all possible classification problem types.
Finesse eLoD Exclusivity Classification Output
1
Binary(Valid, Erroneous)
2
LoD-1
Binary(Valid, Building Error)
2
LoD-2
on
MultiClass
(Valid, Building Error, Facet Error)
2
LoD-2
off
MultiLabel
(Valid, Building Error, Facet Error)
3
LoD-1
on
MultiLabel(children(Binary(Valid,
Building Error)))
3
LoD-2
on
MultiLabel(children(MultiClass
(Valid, Building Error, Facet Error)))
3
LoD-1
off
MultiLabel(children(Building Error))
3
LoD-2
off
MultiLabel(children(Building Error)
∪
children(Facet Error))
Figure 7. Statistics per urban scene and error type. Almost similar situations can be noticed.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
December 2019
871


