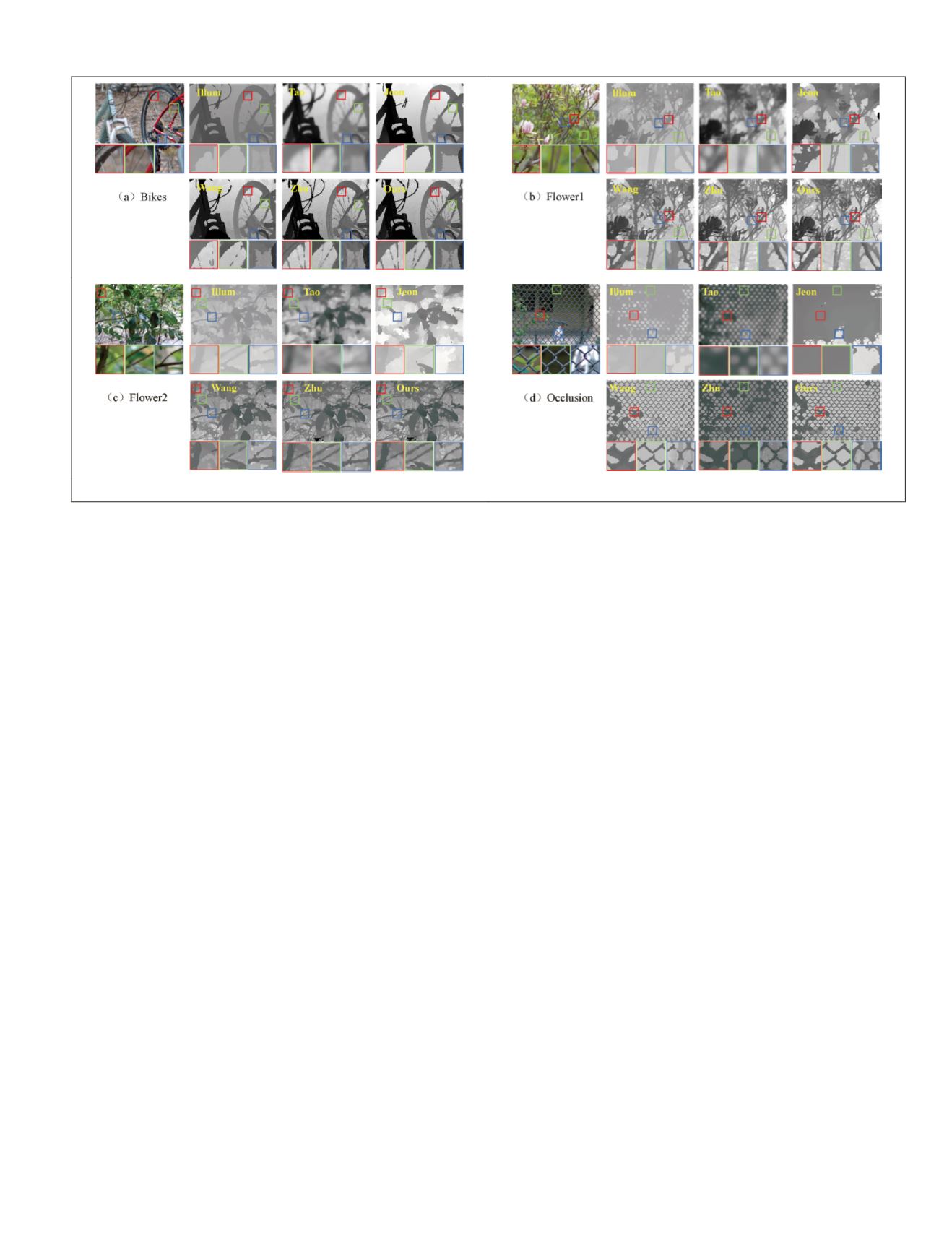
the Lytro Illum camera. The methods of Tao
et al.
and Jeon
et al.
still provide severely oversmooth results and fail to
extract the occlusion boundaries. On the whole, the depth
maps obtained by the Lytro Illum software and the methods of
T.-C. Wang
et al.
and Zhu
et al.
are similar to the depth map
obtained by our method; the depth of some heavy occlusion
areas is also scaled up to illustrate the advantages of our
method. From the enlarged close-up images, it can be seen
that our algorithm can restore subtler boundaries compared
with other methods. For example, the Lytro Illum software
and the method of T.-C. Wang
et al.
reconstruct only a few
spokes of the bicycle (Figure 24a); the method of Zhu
et al.
reconstructs more spokes, but fewer than our method. The Ly-
tro Illum software fails to accurately restore the shape of the
wire mesh (Figure 24d); the methods of T.-C. Wang
et al.
and
Zhu
et al.
can reconstruct the shape of the wire mesh, but the
T.-C. Wang
et al.
method breaks some intersections of wires,
and the Zhu
et al.
method provides oversmooth results, and
some wires cannot be distinguished from the background cor-
rectly. In comparison, our proposed method provides a more
accurate depth map.
Conclusion
In this article, we proposed an algorithm to handle complex
occlusion in depth estimation of a light field. The occluded
pixels are effectively identified using a refocus method. For
each occluded pixel, the unoccluded views are accurately
selected using an adaptive unoccluded-view identification
method. Then the initial depth map is obtained by computing
the cost volumes in the unoccluded views. The final depth
is regularized using an
MRF
with occlusion cues. The advan-
tages of our proposed algorithm are demonstrated on various
synthetic data sets as well as real-scene images compared
with the conventional state-of-the-art algorithms. Compared
with the four algorithms—Tao
et al.
(2013), Jeon
et al.
(2015),
T.-C. Wang
et al.
(2016), and Zhu
et al.
(2017)—the
RMS
error
decreases by about 15% with our proposed method on the
synthetic data sets and by about 9% percent on real-scene
images. Compared with the top-ranked conventional method,
OBER
-cross+
ANP
, our method is a little higher in term of mean
square error. Compared with the top-ranked deep-learning
methods, our method is inferior. However, our method is a
good choice if you do not have a graphics processing unit
to train a network and want to obtain your disparity map as
soon as possible. Because a light-field camera can reconstruct
detailed three-dimensional models, it can be used in the
comprehensive inspection of industrial mechanical parts, life
medicine, face recognition, and the establishment of three-
dimensional models in games and movies. The proposed
method can be valuable in these applications.
Acknowledgments
This research is funded by the National Key Research and De-
velopment Program of China (project 2018YFB1305004) and
the National Natural Science Foundation of China (project
41471388).
References
Anzai, Y. 2012. Pattern Recognition and Machine Learning. Boston:
Elsevier.
Boykov, Y., O. Veksler and R. Zabih. 2001. Fast approximate energy
minimization via graph cuts.
IEEE Transactions on Pattern
Analysis and Machine Intelligence
23 (11):1222–1239.
Chen, C., H. Lin, Z. Yu, S. B. Kang and J. Yu. 2014. Light field stereo
matching using bilateral statistics of surface cameras. Pages
1518–1525 in
2014 IEEE Conference on Computer Vision and
Pattern Recognition
, held in Columbus, Ohio, 23–28 June 2014.
Edited by J. Editor. Los Alamitos, Calif.: IEEE Computer Society.
Dong, F., S.-H. Ieng, X. Savatier, R. Etienne-Cummings and R.
Benosman. 2013. Plenoptic cameras in real-time robotics.
The
International Journal of Robotics Research
32 (2):206–217.
Dudoit, S. and J. Fridlyand. 2002. A prediction-based resampling
method for estimating the number of clusters in a dataset.
Genome Biology
3 (7):research0036.1.
Frey, B. J. and D. Dueck. 2007. Clustering by passing messages
between data points.
Science
315 (5814):972–976.
Figure 24. The depth map for real-scene images.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
July 2020
455


