occluded pixels in other algorithms; only the selected oc-
cluded views of the occluded pixels are used to estimate
depth, which leads to a reduction in depth accuracy, whereas
the edge pixels are removed from the occluded pixels in
our method, so all views are used to estimate depth, which
improves the depth accuracy. In addition, our method selects
more accurate unoccluded views and eliminates the aliasing
influence of edge pixels in the angular patch by removing the
views corresponding to the edge pixels in the spatial patch.
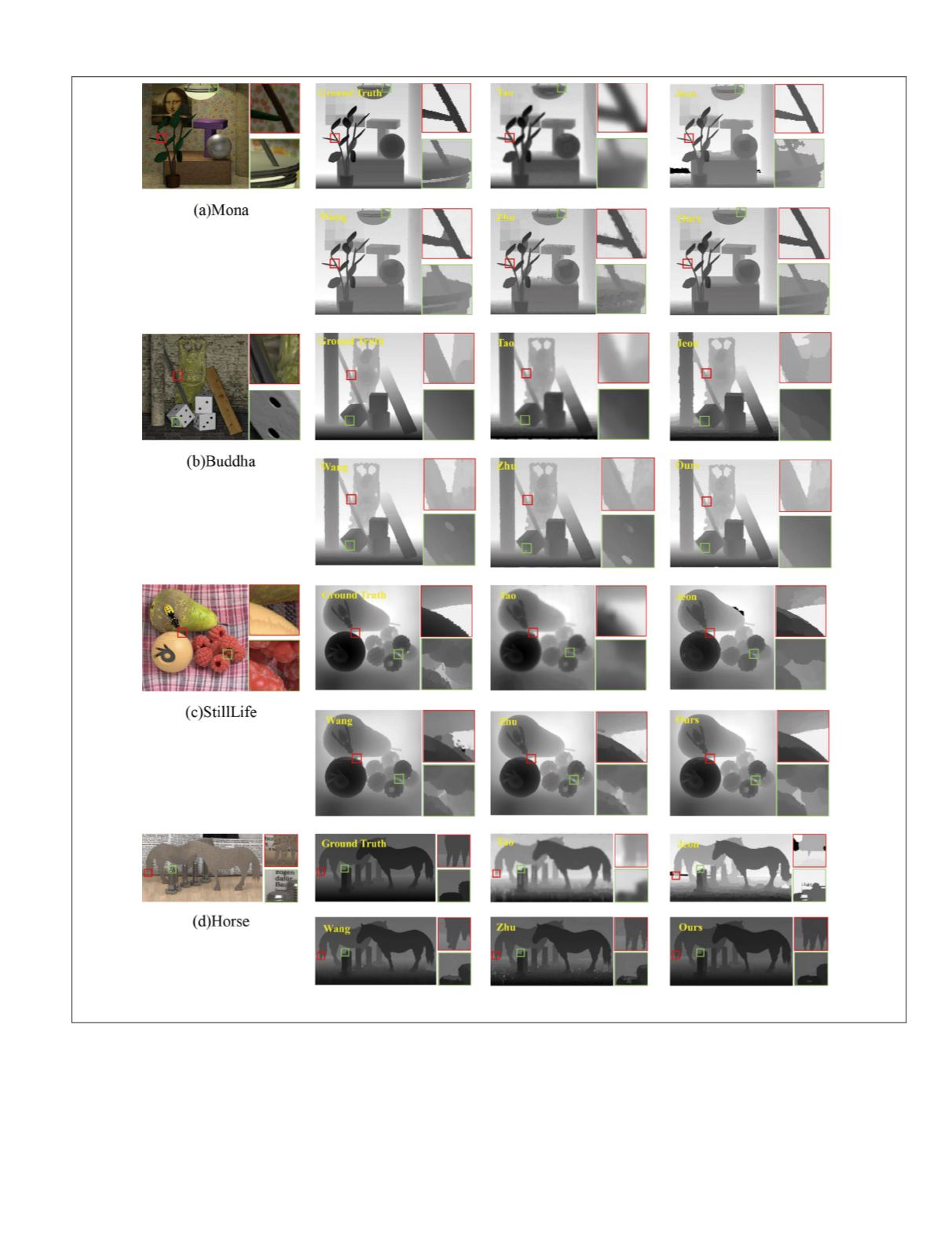
Experimental results show that our proposed method can
effectively deal with complex occlusions (the branches in
Figure 18a and the close-up of the red box in Figure 18c).
The quantitative comparisons of the depth map on the
Wanner
et al.
data sets are shown in Figure 19. As we can see
from the line charts, the error distribution concentrates toward
smaller error, except for the method of Tao
et al.
(2013), and
that trend is most obvious using our method. In addition, the
number of large errors in the error line charts obtained by our
Figure 18. The depth maps of synthetic data sets: (a) Mona, (b) Buddha, (c) StillLife, and (d) Horse.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
July 2020
451


