surrounding environment. Hence, our method devotes to detect
linear features with limited width and adequate length in an im-
age.
DTM
data, if available, is adopted as auxiliary information
to refine the results of morphological analysis by removing pos-
sible false detections through relief calculation. The main steps
of the proposed gully detection method are shown in Figure 2.
The first operation of our method is filtering the image by
area opening and closing operators, respectively. Area open-
ing
γ
α
λ
of a binary image can be defined as (Vincent, 1993):
γ
α
λ
(
X
) =
È
{
X
i
|
i
∈
I
,
Area
(
X
i
)
≥
λ
}
(1)
where the parameter
λ
is a threshold of area,
X
is the collec-
tion of the foreground pixels in the image (i.e., the set of pixels
with value of 1 in the binary image), and (
X
i
)
i
∈
I
denotes the
connected components of
X
;
γ
α
λ
(
X
) is equal to the union of the
connected components
X
i
with area greater than or equal to
λ
.
In mathematical morphology, a grayscale image is treated
as a function
f
. For the grayscale image
f
, area opening
γ
α
λ
(
f
)
can be represented as (Vincent, 1993):
(
γ
α
λ
(
f
))(
x
) =
sup
{
h
≤
f
(
x
)|
x
∈
γ
α
λ
(
T
h
(
f
))}
(2)
where
x
is a variable standing for any pixel of the grayscale im-
age,
f
(
x
) denotes the grayscale value of the pixel,
T
h
(
f
) stands for
the thresholding result of
f
at grayscale value
h
, i.e.,
T
h
(
f
) = {
x
|
f
(
x
)
≥
h
}. If
h
equals to min(
f
(
x
)), all pixels will be included in
T
h
(
f
).
The larger the
h
value, the less pixels in the resultant
T
h
(
f
). With
a given area threshold
λ
>0, a specific pixel
x
may or may not
belong to the result of
γ
α
λ
(
T
h
(
f
)), depending on the
h
value. The
maximum value of
h
which makes the pixel
x
belong to the result
of
γ
α
λ
(
T
h
(
f
)) is the resultant value of the pixel after area opening.
From a morphological perspective, the area opening filter is
algebraic opening (Soille, 2003), and it removes all connected
components whose area (in number of pixels) is smaller than
a given threshold
λ
. Area closing is the dual operation of area
opening. The area opening filter affects the bright connected
components, and area closing filter affects the dark connected
components. More details of area opening and closing and
their implementations were elaborated by Vincent (Vincent,
1993). The two filters are used to filter out some small features
from the image such as boulders, boulder shadows, and noises
introduced in imaging process. In our experiments, the thresh-
old value
λ
for both area opening and closing operations is set
to 200/R² empirically, where R is the image resolution. The
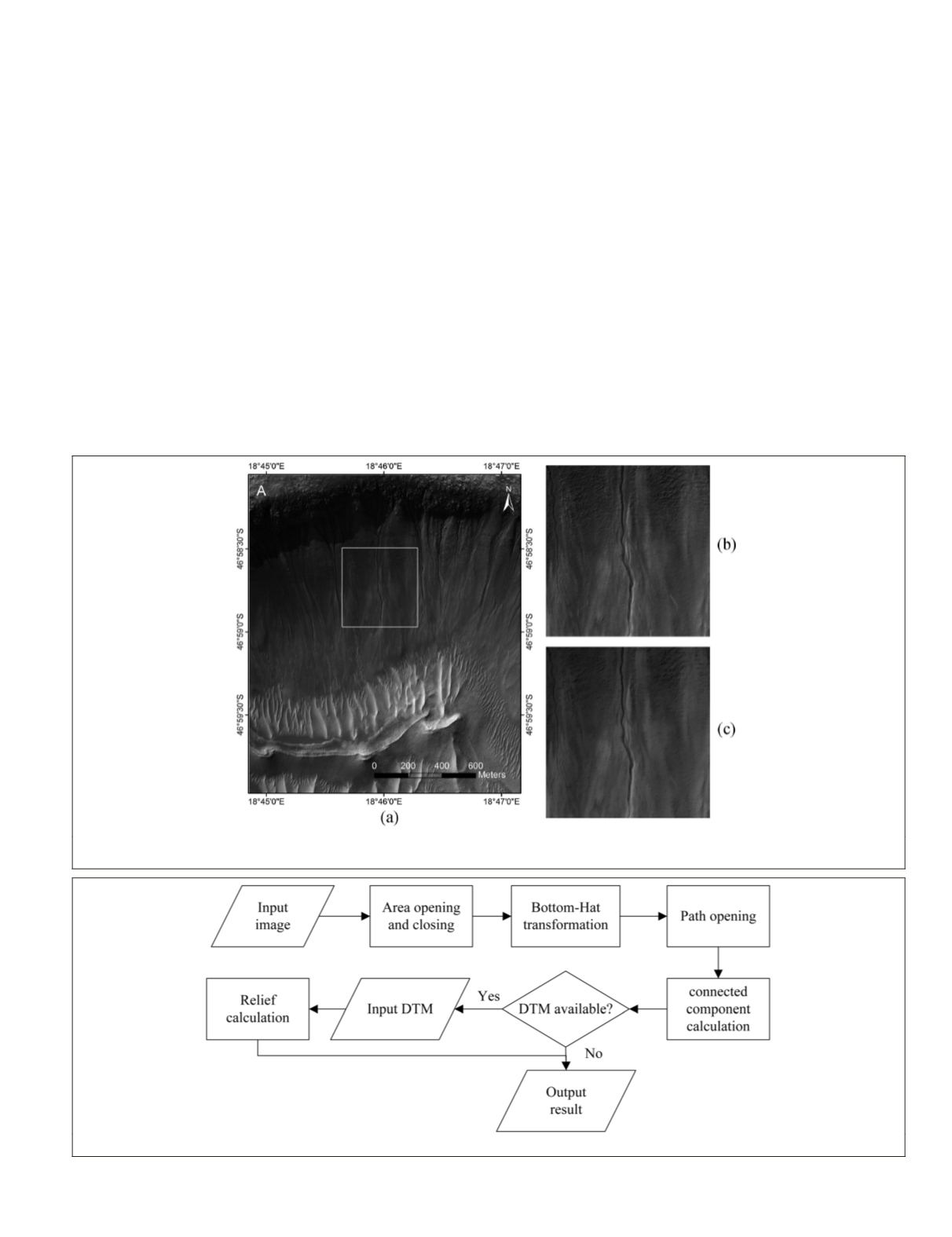
filtering result of site A is shown in Figure 3. It can be seen
that the background becomes smoother and the gully itself is
preserved. This will be helpful to the subsequent Bottom-Hat
Figure 2. Flowchart of the automated gully detection method.
Figure 3. Result of area opening and closing filtering for a subset of HiRISE image at Site A: (a) Original image, (b) Detail view on the sub-
set of the original image, outlined as white rectangle, and (c) Detail view on the subset of the resultant image.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
December 2015
915


