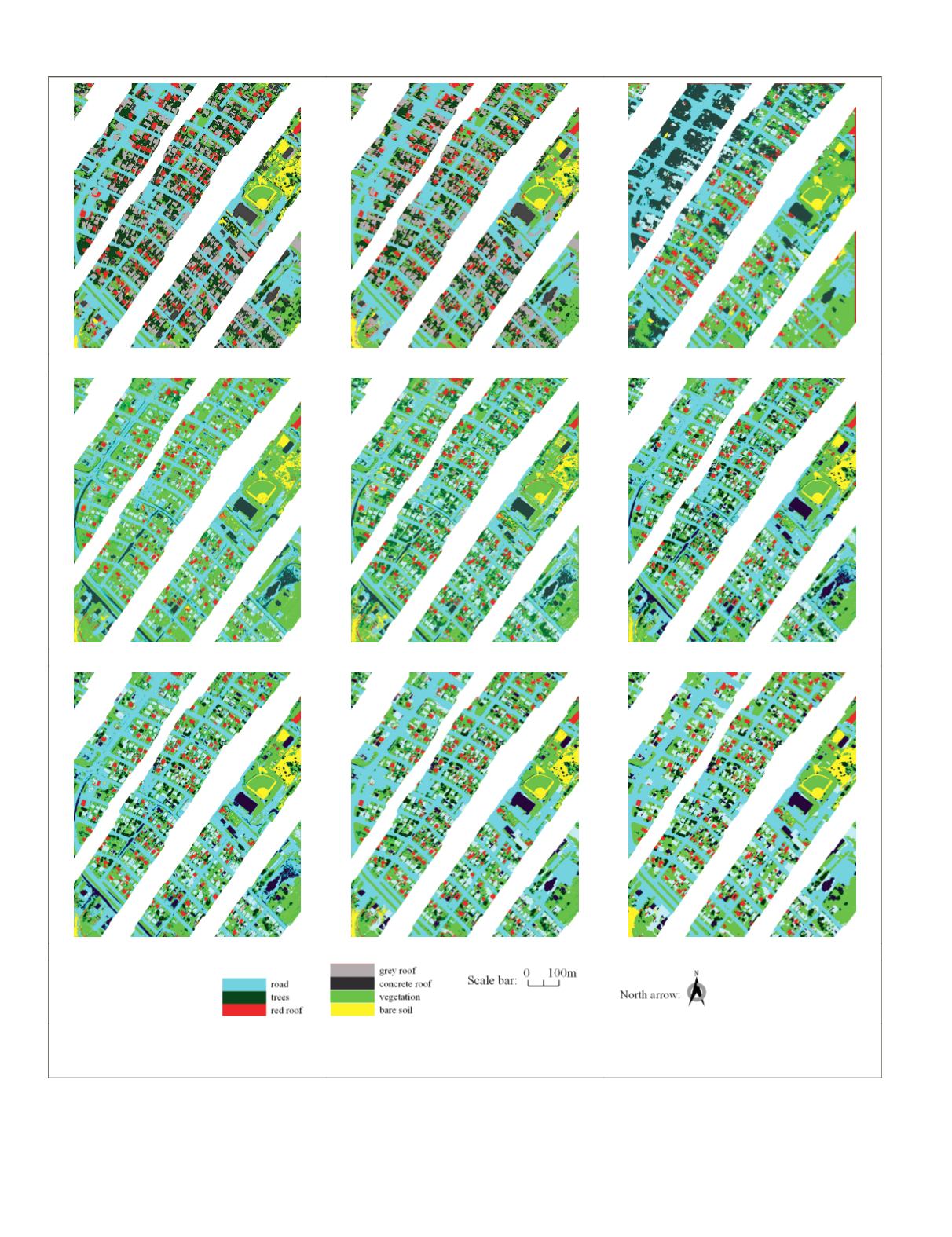
(a)
(b)
(c)
(d)
(e)
(f)
(g)
(h)
(i)
Plate 1. Thematic maps of the study area: (a) runner-up in the 2014 Data Fusion Contest; (b) 2014 Data Fusion Contest winner; (c) TI-HSI;
(d) VIS; (e) VIS-SF; (f) VIS-VS; (g) In-VIS-VS; (h) R-InVIS-VS; and (i) the proposed method. These thematic maps are utilized to allow a visual
comparison between the proposed method, the winning methods in the 2014 Data Fusion Contest, and the other methods listed in Table 4.
between two classification results, is also utilized in this
paper. Although the single spatial feature can improve the
discrimination, it is observed that the multiple-feature fusion
can achieve a better performance. Furthermore, the proposed
approach combining gap inpainting, road extraction, and
VS
fusion can obtain the best result. However, some issues with
the current fusion approach need to be mentioned. First, the
computational complexity is high because of the multiple
908
December 2015
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


