a flat terrain, which can be considered a limitation of this
study. Experimental assessments with steep terrain, as well as
procedures to cope with these variations, are recommended
as future work.
The estimated clock differences were refined by
LSM
adjustment, resulting in the addition of 0.04 s. The value
of the estimated standard deviation of the postprocessing
synchronization technique was 0.0007 s (0.7 ms), obtained
from the covariance matrix in the
LSM
adjustment. The cor-
rection value of 0.04 s to the laser clock, o
corresponds approximately to a displacem
ground, considering a
UAV
speed of 4 m/s.
chronization error of 0.7 ms results in 2.8
ground. This error obtained with the proposed postprocessing
synchronization method, using the correlation technique and
LSM
refinement, can be considered compatible with other syn-
chronization approaches considering the coupled devices. For
instance, online synchronization using lightweight
ALS
aboard
a
UAV
usually achieves a precision around 1 ms, as presented
by Adler
et al.
(2014) and Torres and Tommaselli (2018). The
results of the postprocessing synchronization are similar to
this precision. However, time synchronization is more pre-
cise in conventional
ALS
systems. Shan and Toth (2018) have
pointed out that online synchronization based on a pulse-per-
second signal can results in an operational synchronization
better than 10 µs.
Synchronization accuracy is difficult to estimate indepen-
dently without considering the other sources of errors, such
as boresight corrections, as previously mentioned. Therefore,
most of the existing works evaluate the effectiveness of the
synchronization method according to the accuracy of the
point cloud generated. In this regard, Table 1 presents the pla-
nimetric and altimetric accuracies of the point cloud obtained
with the proposed postprocessing synchronization method
and from related works using similar
ALS
systems aboard a
UAV
(Jaakkola
et al.
2010; Wallace
et al.
2012; Glennie
et al.
2013; Torres and Tommaselli 2018). The point-cloud accuracy
presented in Table 1 for the proposed postprocessing syn-
chronization method is a result from experiment D (see Point-
Cloud Assessment: Boresight Correction and
LSM
Refinement
Improvements).
Table 1. Accuracy (in meters) of point cloud obtained with
airborne laser scanning via unmanned aerial vehicle using
n approaches.
Method
Accuracy
Planimetric Altimetric
Jaakkola
et al.
(2010)
Online sync.
0.35
0.10
Wallace
et al.
(2012)
Sync. with SfM 0.34
0.15
Glennie
et al.
(2013)
Online sync.
0.09
0.17
Torres and Tommaselli
(2018)
Online sync.
0.58
0.23
Proposed method
Postprocessing
sync.
0.28
0.10
The related works presented in Table 1 also used
UAV
platforms with a maximum flight height of 75 m, resulting
in an altimetric accuracy ranging between 10 and 23 cm and
a planimetric accuracy smaller than 58 cm. The accuracy of
the point cloud generated with the proposed time-synchro-
nization method achieved planimetric (28 cm) and altimetric
(10 cm) accuracies compatible to the point clouds obtained
in these related works, which applied online synchronization
with similar
ALS
systems and
UAV
flight heights. More details
on the point-cloud assessment are given in the next section.
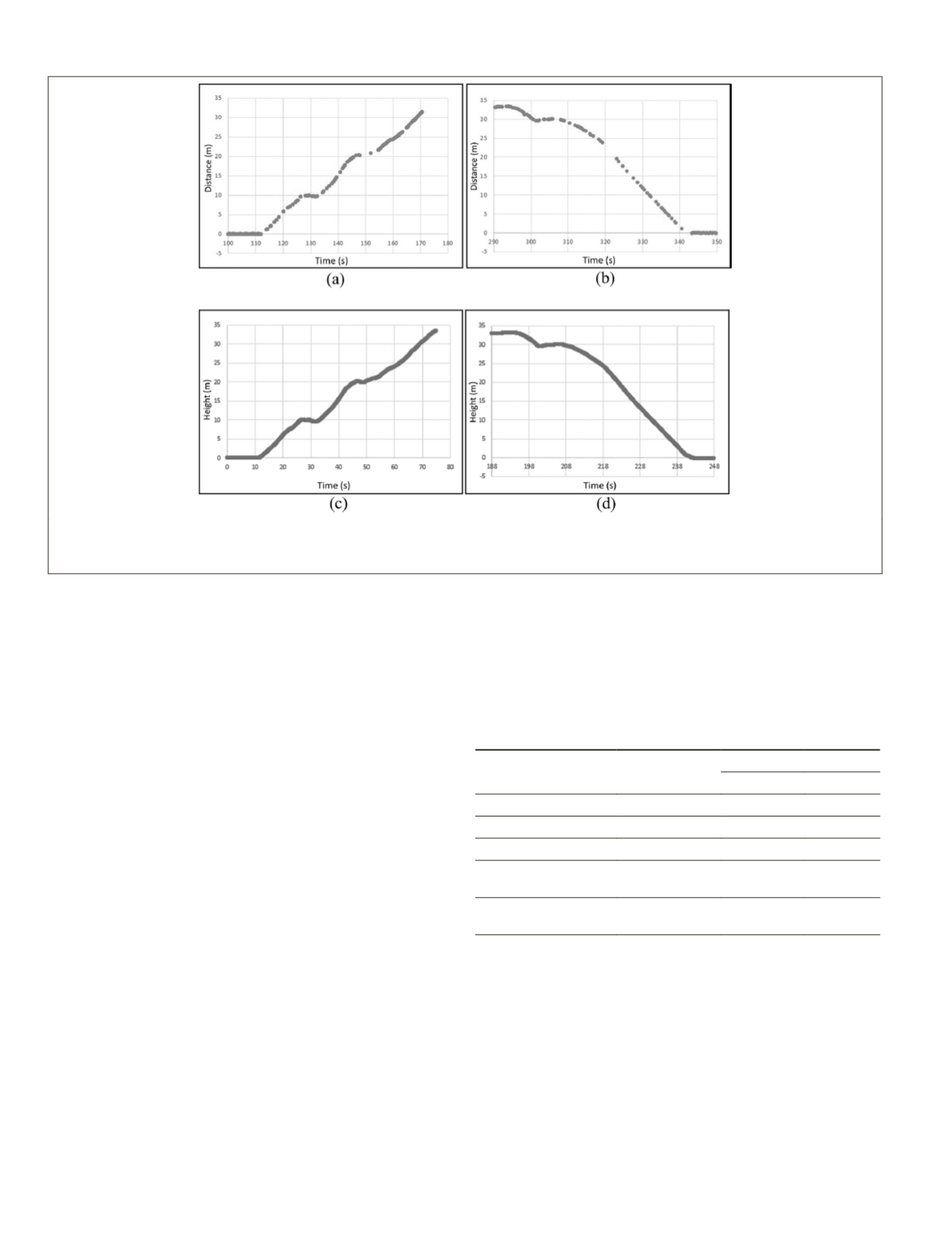
Figure 6. Comparison between signals: (a) distance obtained by laser unit (lidar distance) during takeoff; (b) distance obtained
by laser unit in landing; (c) flight height obtained by global navigation satellite system positioning during takeoff; (d) flight
height obtained by global navigation satellite system positioning in landing.
760
October 2019
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


