T
able
2. P
arameters
for
P
ix
4D
Step
Parameter
Setting
Initial processing
Processing
Feature extraction
Optimization
Output
Aerial nadir
1
Externals and all internals
None selected
Point cloud
Image scale
Point density
Minimum matches
Point cloud filters
1/4 (Multiscale on)
Optimal
3
None
DSM/orthomosaic
Noise filtering
Source data
Polygon count
On
On
Geotiff
Resources
Resources
All avalible
T
able
3. P
arameters
for
ICE
Step
Parameter
Setting
Import
Panorama type
Camera motion
Simple
Auto-detect(planar)
Stitch
Roll
0 Degrees
Export
Scale
File format
Quality
100
JPEG
100/High
Before any processing is done or parameters are set, Pix4D
highly recommends the inclusion of any
GCP
data that may be
available. This data was especially important for this research
since no
GPS
data was included in the Exchangeable Image
File Format (
EXIF
) data for the images.
GCP
data also helps
reduce shift problems and other errors which may be present
in the final model. Each of the
GCP
s was
located in five of the images to help ensure
image quality.
Image Composite Editor (ICE)
ICE
is an advanced panoramic image stitch-
ing freeware produced by Microsoft, and is
typically used to create detailed panoramas
from numerous individual images. Unlike
SfM
software packages,
ICE
does not create a
separate 3D point cloud and cannot gener-
ate 3D images. For these reasons, it does
not create the same outputs as Photoscan
and Pix4D (i.e., no dense point clouds or
meshes).Therefore, the number of steps and
parameters are relatively few. In addition
ICE
currently has no way to include
GCP
s
in the program; this must be completed
using a separate program such as ArcGIS
®
or ENVI.
ICE
is run in four sequential steps:
import, stitch, crop (optional), and export.
A complete list of the parameters can be
seen in Table 3.
Geometric Accuracy Assessment
To quantify geometric accuracy, root mean
square error (
RMSE
) was used.
RMSE
is the
comparison of real world (ground truth)
information to estimated (image derived)
measurements. In the case of this research
17
GCP
s (25 percent of the total
GCP
s) had
their real world location compared to their
estimated location in all orthomosaics.
RMSE
calculations were conducted using
the following equation:
i
n
i
i measured
i
i measured
X X
Y Y
n
=
∑
−
(
)
+ −
(
)
(
)
1
2
2
,
,
(1)
where
n
is the total number of samples,
X
i
and
Y
i
are the
X
and
Y
measurements of point
i
’s location in the image, and
X
i,measured
and
Y
i,measured
are the position of
GCP
i
as measured in the
field. To determine statistical significance a one way stacked
analysis of variance (
ANOVA
) was conducted in MINITAB (ver-
sion 14) with
α
= 0.05.
ANOVA
uses the variances of the variable
provided for each group to determine if there are differences
between the groups.
ANOVA
was chosen because it is one of
the most powerful statistical tests when comparing multiple
groups and examining difference. It was also chosen because
it is not overly sensitive to deviations from normality, and is
more powerful than the Kruskal-Wallis test (McDonald, 2009).
The alpha value is the cutoff for determining significance,
although somewhat arbitrary, a value of .05 is typically used
in scientific literature. Contingent on the results of the
ANOVA
post hoc
Tukey-Kramer test were also conducted for each
pairwise comparison. The Tukey Kramer tests compare each
group pairwise to determine specific differences among all the
groups. Tukey Kramer tests are one of the most commonly used
comparison tests used with
ANOVA
. Tukey Kramer tests only
need to be done if the results from the
ANOVA
are significant.
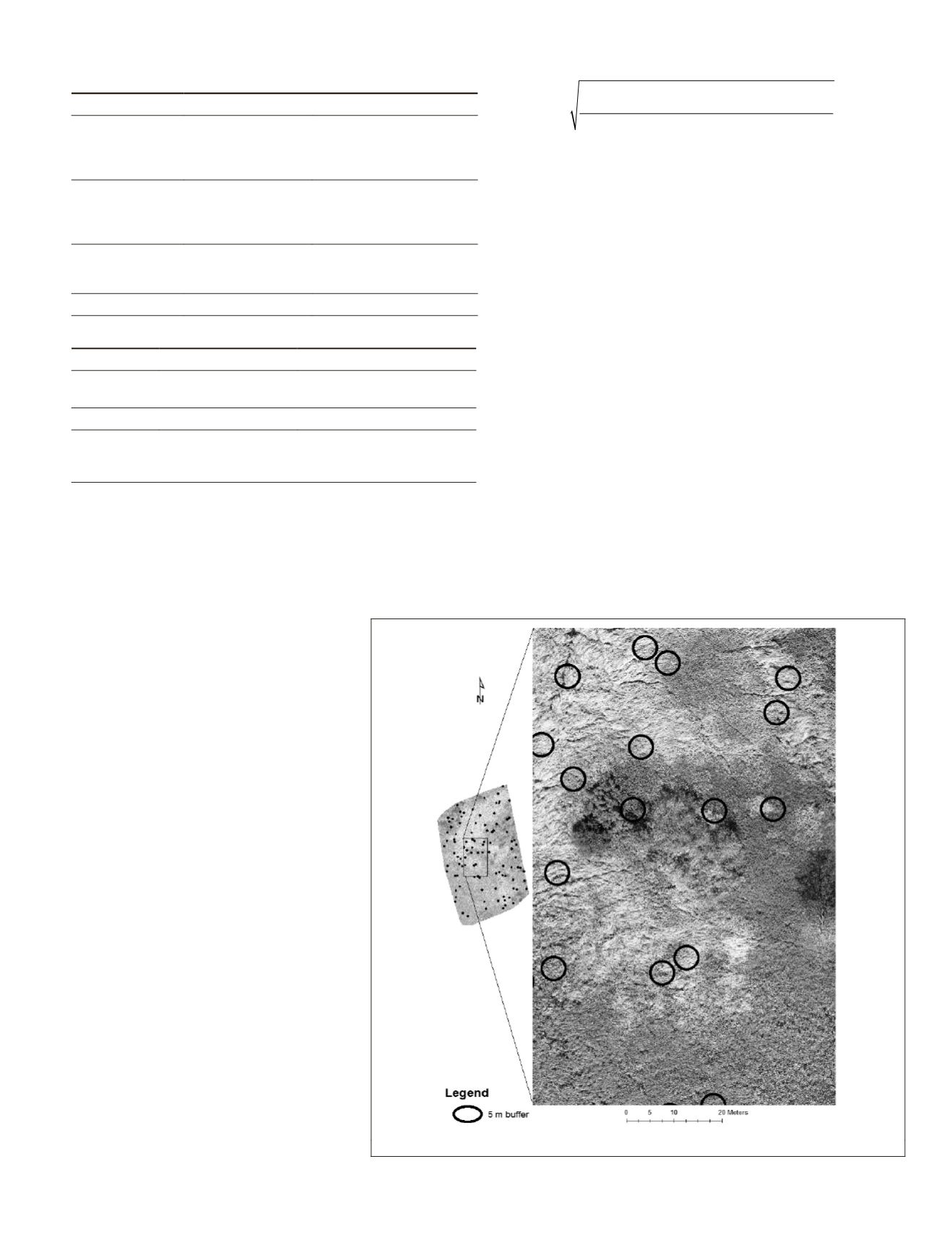
Visual Quality Assessment
To quantify the visual quality of the images, 100 points were
created using the “create random points” tool in ArcGIS
10.2.2. A 2.5 m (5 m diameter) circular buffer was created
around each point (Figure 1).
These locations were then assigned to one of four land
cover classes based on visual interpretation: reed canary grass
Figure 1. Examples and distribution of the buffers used for validation of visual quality.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
June 2016
421


