pixels. According to the spherical panoramic imaging model,
D
= 4000/
π
(pixels/rad), so the pixel size on the ground is
ds
/D (m/pixels). This shows that the pixel size on the ground
is proportional to the object distance. Therefore, we can
obtain the registration error of prominent points
δ
8
= 19.31
pixels in the
n
o. 12 panoramic image (
ds
< 10 m) less than 10/
(4000/
π
) × 19.31 = 0.152 m. Finally, the registration results of
31 panoramic images show that no road lanes (0.13 m) have
holistic deviation; this is consistent with the above analysis.
Discussion
Stitching Error of Panoramic Image
In theory, the panoramic image does not conform to the
geometric imaging model; there is only one imaging center in
the panoramic imaging model, but the multi-lens center of the
panoramic camera is not coincident, so the stitching errors are
inevitable. Although the misalignment can be eliminated in vi-
sion by seeking optimal stitching lines, the panoramic images
are still not meeting the strict geometric imaging model. The
panoramic camera used in our article includes six lenses—five
in the side (horizontal) and one at the top (vertical)—and the
distribution of each lens does not average completely, and the
center of each lens does not overlay. These combination errors
of the panoramic camera lead to stitching misalignment (Fangi
and Nardinocchi 2013; Li
et al.
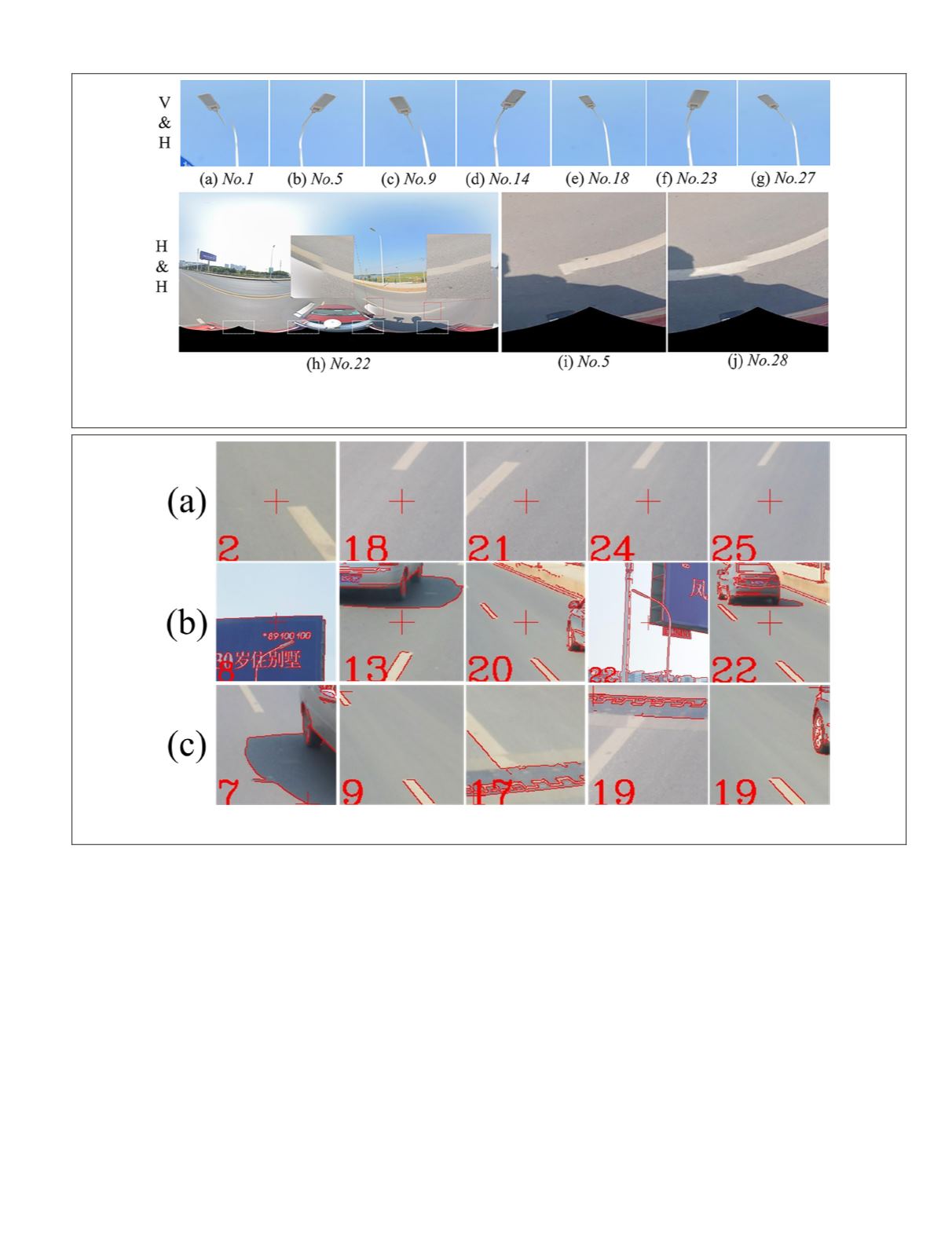
2017; Zhu 2017, 2019). Figure
16 shows the misalignment in the different panoramic images.
Figure 16a–g shows seven road lamps with stitching mis-
alignment in different panoramic images. Figure 16h–j shows
four road lanes with stitching misalignment in the H&H seam.
These stitching misalignments are affected by object distance,
image size, and so on; thus, the panoramic image does not
strictly conform to the panoramic imaging model, and it is
difficult to get high registration accuracy between
LiDAR
points
and the panoramic image. In addition, the feature points of
road lamp and lane do not austerely meet the corresponding
relationship when close to the camera position; this error is
similar with the stitching error of the panoramic image.
Figure 16. The stitching misalignment of the panoramic image. V&H express the stitching misalignment between vertical and
horizontal lenses, respectively, which are mainly on the road lamps with a high vertical angle (
v
); H&H express the stitching
misalignment between horizontal lenses, which are mainly on the road lanes with a low vertical angle (
v
).
Figure 17. The error extraction feature points in different panoramic images (the lines are the image edge, and the number is
the panoramic image number). (a) Leakage extraction. (b) Recognizable error extraction. (c) Unrecognized error extraction.
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
November 2019
837


