distributions are regular, and thus our registration method us-
ing the feature points of road lamp and lane has wide applica-
bility and high precision.
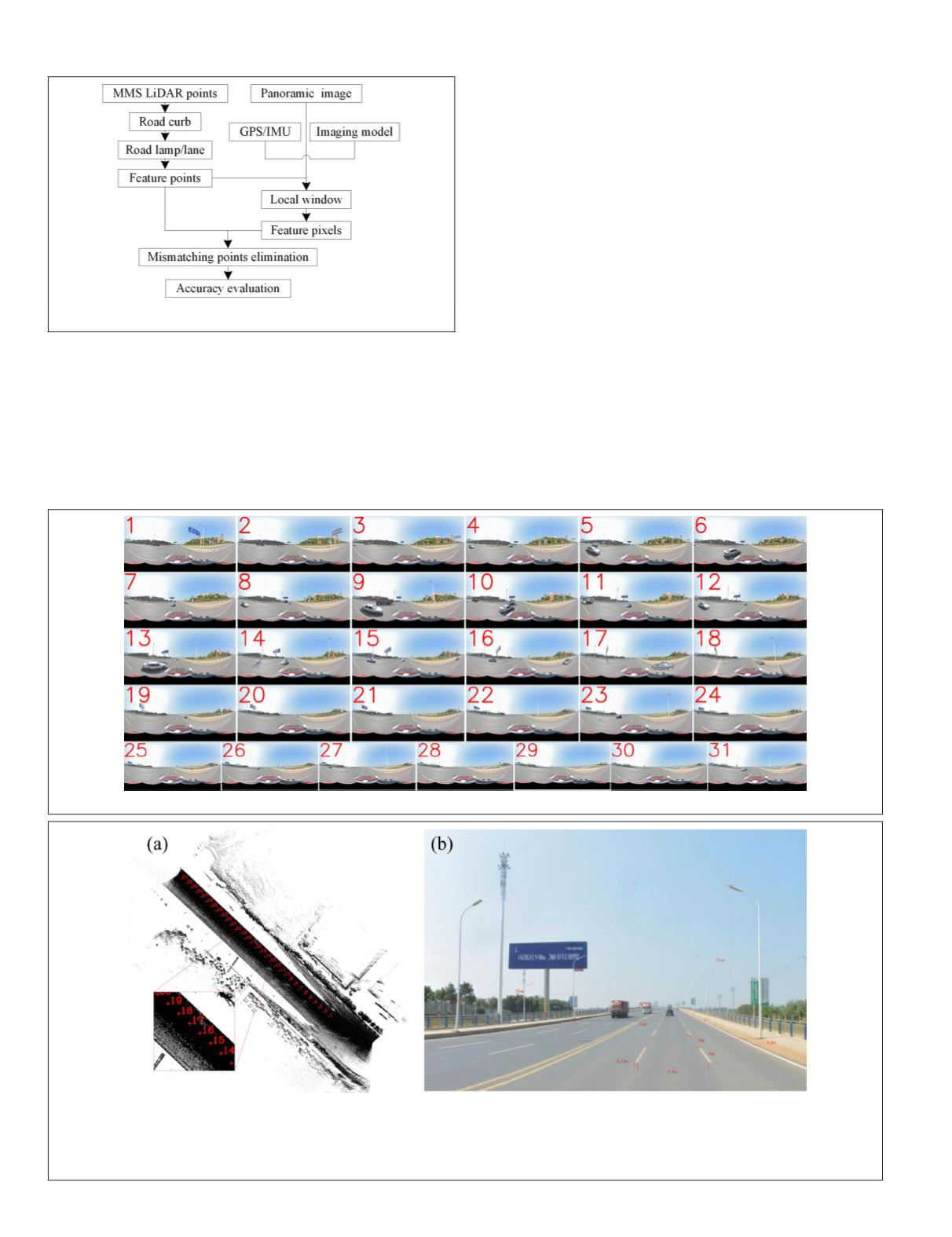
Figure 1 shows a flowchart of our registration method.
This article is organized as follows. First, we introduce the
extraction and matching of road lamp and lane feature points.
Then comparative experiments are conducted to verify the
effectiveness of our registration method. Next, we discuss
the precision, automation, and weakness of our registration
method. Finally, we present our conclusions.
Materials and Methods
We use the feature points of road lamp and lane for registra-
tion. First, the road lamp and lane were extracted from the
LiDAR
points by horizontal grid and reflectance intensity and
then by optimizing the endpoints as the feature points of road
lamp and lane. Second, the feature points were projected
onto the panoramic image by initial parameters and then by
extracting corresponding feature points near the projection
location. Finally, the direct linear transformation method was
used to solve the registration model and eliminate mismatch-
ing feature points.
Figure 2 shows the panoramic image sequence (4000 ×
8000 pixels); the interval between adjacent images is approxi-
mately 7 m. Figure 3 shows the
MMS
LiDAR
points and the
relative position between road lamps and lanes. The length
and height differences of the road are approximately 250 m
and 4.6 m, respectively, the data of which include 3.8 million
points. The
MMS
LiDAR
points correspond to the panoramic
image sequence at the same place, and the initial values of the
camera position (
X
S
Y
S
Z
S
) and attitude (
r
x
r
y
r
z
) are known.
Figure 1. Flowchart of our registration method.
Figure 2. Panoramic image sequence. The number is the panoramic image number (nos. 1–31).
Figure 3. MMS LiDAR points and the relative position between the road lamps and lanes. (a) Plane map of the MMS LiDAR
points. The dots and number express the position of 31 panoramic images. (b) Local image from the no. 12 panoramic image.
The road width is 23 m, and the road curb height is 0.3 m; the size of the road lane itself is 0.13 × 6 m, and the distances
between adjacent lanes are 3.5 and 9 m in vertical and parallel road directions, respectively. The road lamp height is 11 m,
and the distances between adjacent lamps are 23.5 and 35 m in vertical and parallel road directions, respectively.
830
November 2019
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


