areas are compared to see the effect of the camera-derived
surface and the quality of the orthoimage.
•
TLS
and
ALS
data are used for flat and sloped areas to see
the quality of the camera-derived surface.
• Earthworks are performed using the camera-derived sur-
face to see the potential for cut/fill application.
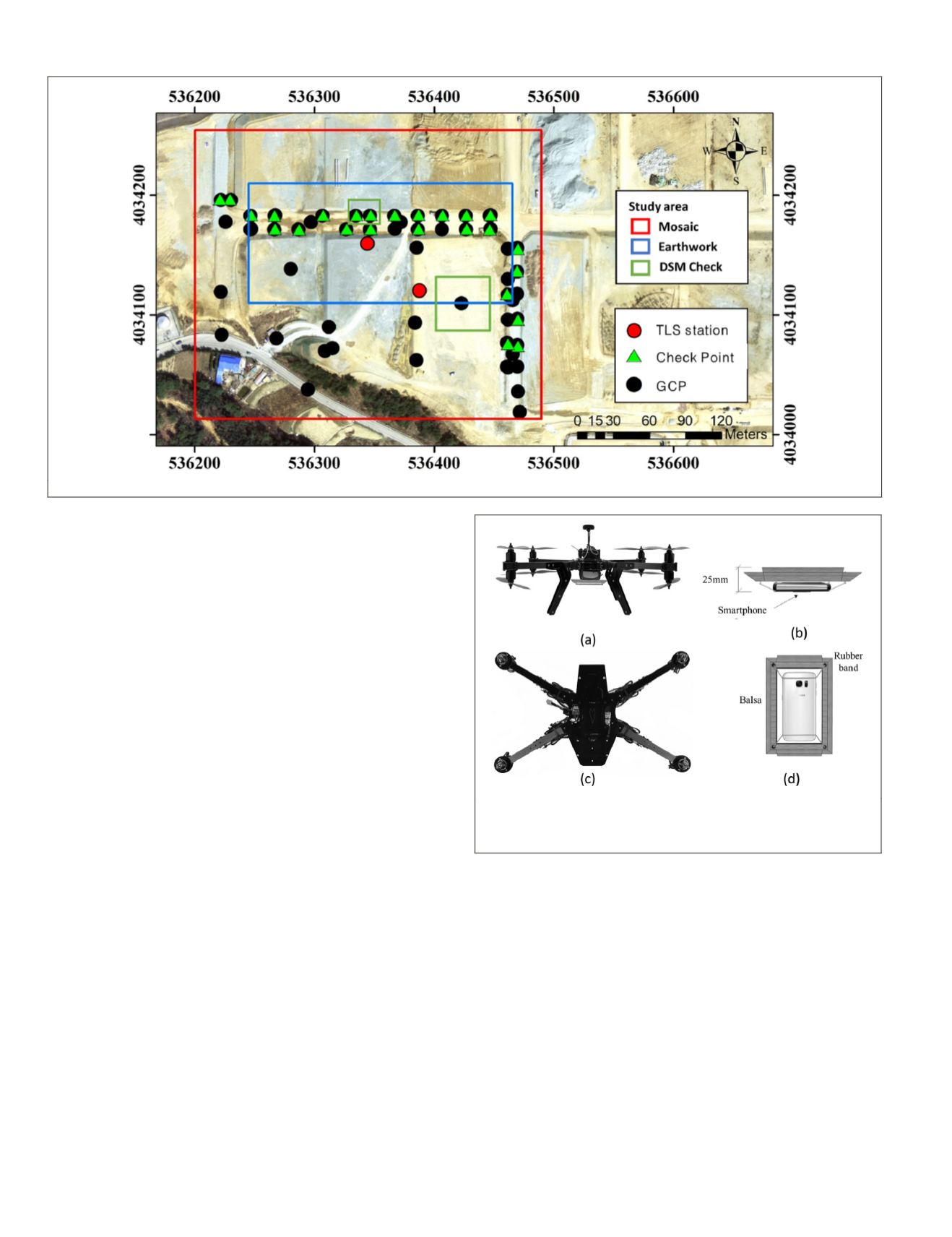
Description of the Study Area
This study area was in a construction field for an industrial
complex (Figure 1) in Maejeong-ri, Yeongdeok-gun, Gyeong-
sangbuk-do, South Korea. It is located 250 km southeast of
Seoul and 140 km northeast of Busan. This construction field
is located at an elevation of 120 m above mean sea level,
and the construction area measured was 71,490 m2 in total.
Overall construction at the site was 65%
of the earthworks finished, as of Decemb
area included piles of gravel and sand fo
fluctuations in their relief rendered the t
ation using
DSMs
generated from
UAV
images. Additionally,
construction of the study area was temporarily stopped before
ALS
shooting, and the earthworks were resumed on the day of
UAV
shooting. The conditions were appropriate for monitoring
changes in the earth volume. Figure 1 shows the base posi-
tions for
TLS
, the
CPs
, and the
GCP
positions in the study area.
GCPs
and
CPs
was settled on the manhole and underground
utilities cover. In theory, accurate results can be achieved by
placing
GCPs
around the edge and inside of the study area.
Unfortunately, in this study a large number of installed
GCPs
were lost due to construction work. Therefore, 53
GCPs
from
the outer perimeter of the study area were ultimately used.
For assessment of point accuracy, we calculated the difference
between the horizontal positions of the
CP
as measured by the
GNSS
and estimated by
UAV
photogrammetry.
UAV Photogrammetry System
The
UAV
was a dual-quad-type octa-copter. It weighed 2.96 kg
and had a lithium polymer 4S 10
Ah
battery and maximum
payload weight of 0.8 kg. The maximum operating time was
about 15 min., and hovering time was about 21 min. The
flight control unit (
FCU
) was by Pixhawk, and had an inertial
measurement unit, a barometric altimeter, and a
GNSS
sensor
to allow control of direction of flight and monitoring of ac-
celeration (Figure 2).
Cameras and Rolling Shutter
Two types of cameras—a smartphone camera and a mirrorless
camera—were mounted in the
UAV
to compare their uncer-
tainties in rolling-shutter on and off scenarios (Table 1 ).
The Samsung Galaxy S7 camera is equipped with autofocus-
ing. Autofocus is a common feature in
DSLR
cameras, and the
Galaxy S7 is the first smartphone with the new phase-detec-
tion autofocusing—quick focus and a high aperture value, to
minimize wobble. The camera is equipped with optical image
stabilization and automatic lens-distortion correction. The
Galaxy S7 has a resolution of 12 megapixels (4,032 × 3,024),
a focal length of 4.2 mm, and a pixel size of 1.4 µm (Samsung
Galaxy S7, 2016).
The Samsung Galaxy
NX
is a mirrorless camera that has
an Android operating system. The camera used in this study
has a 16 mm lens and a six-element, seven-setting automatic
lens-distortion correction function. It has a resolution of 20
megapixels (5,472 × 3,648) and a pixel size of 4.264 µm (Sam-
sung Galaxy
NX
, 2016).
Figure 2. The antivibration mount designed for the camera.
(a) Front and (c) plan views of a camera mounted on a
UAV
.
(b, d) A camera mounted on the antivibration mount.
Figure 1. The study area.
890
December 2019
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING


