Orthoimage and DSM Generation
The
SfM
method gathers information regarding the camera
type, image size, and focal length from photographs and esti-
mates initial values. For the Pix4D
SfM
program, the claimed
accuracy is around 0.25 pixels. Reprojection error depends on
the quality of the camera calibration as well as the quality of
the marked
GCPs
on the images. Agisoft PhotoScan and Pix4D
have mean reprojection-error values below 2 pixels across all
spatial scales (Burns and Delparte 2017).
During the initial processing of the Pix4D program in this
study, a binary descriptor of the scale-invariant feature-trans-
form algorithm (Lowe 2004), similar to that of Strecha
et al.
(2012 ), was used to extract and subsequently match features
from photographs (Küng
et al.
2011).
The coordinate system of the images’ geolocations was set
to WGS_1984_UTM_zone 52N. To generate accurate posi-
tional information, bundle adjustment was performed. The
point-cloud densities for the S7 with rolling shutter off, the
S7 with rolling shutter on, and the
NX
with rolling shutter on
were, respectively, 32.61, 33.02, and 46.13 points/m
3
.
DSMs
include the heights of objects sit
and this will define the quality of orthop
et al.
2015). Several errors are inherent in
and filtering is necessary. Noise filtering
remove data with excessive height differences. Additionally,
there are various random errors associated with the
SfM
method.
Errors must be removed using methods that are specific to
each region of the study area. For example, surface smoothing
is applied to remove errors that produce protrusions on the
topography.
The basic data used to generate a
DSM
are a dense point
cloud generated by photometric software. A point cloud is
generated when multiple matches and errors have been re-
moved through cloud noise filtering and smoothing processes.
A point cloud consists of x-, y-, and z-coordinates that are not
registered to any cartographic or local reference system.
In this study, all
DSMs
were processed in Arcmap’s
LAS
data
set to raster tools with inverse distance weighting—the most
widely used method of interpolation for
UAV
data (Figure 5).
Accuracy Evaluation
Georeferencing Errors
Aeronautical-survey work regulations specify a permissible
standard of
RMSE
, and both cameras satisfy this standard
(Korean National Geographic Information Institute Notice
2013-2236 ). When the
RMSE
values for
GCPs
and
CPs
were con-
verted into
GSDs
in pixels, the
NX
camera performed very well,
with an accuracy within 1 pixel compared to the other camera
(Table 5). However, the
RMSE
values of the S7 camera were 2–3
pixels. This was likely due to limitations in the performance
of the relatively inexpensive lenses used in the smartphone.
Following accuracy assessment using the
CPs
, the scale and
georeferencing of the orthomosaics were also analyzed. Accuracy
was assessed in terms of the shifts that indicated errors in geo-
referencing, or changes in area that indicated errors in scale. To
evaluate the scale and georeferencing parameters, we compared
calculated
CP
and
GNSS
-surveyed
CP
.
CP
errors were expressed
using varying sizes of points, as illustrated in Figure 6.
Quality of Orthoimage Using Polygon Area Comparison
In assessing the quality of orthoimages, four sets of polygons,
such as the manhole cover, were digitized using Esri ArcGIS.
Then the digitized polygon area was compared with the field-
surveyed area.
The polygon area-difference standard deviation for the S7
(rolling shutter on) and
NX
cameras was about 0.03 m2, but for
the S7 with the rolling shutter off it was 0.05 m2 and greater
slight difference in polygon delineation
on whether rolling shutter was on or off.
of the manhole for the S7 with rolling
with
RS
on, and the
NX
was, respec-
tively, 2.022, 2.040, and 2.024 m
2
. Note that the standard
deviation of these areas showed that the S7 with
RS
option on
and the
NX
have similar sizes. The shifts were observed in S7
orthoimages for both
RS
on and off, and this shift probably oc-
curred because the manholes are located on the edge of the S7
image and because of camera calibration-error effects on the
DSM
generation step, resulting in poorer
3D
reconstruction and
diminishing the model’s accuracy (Figure 7).
TLS and ALS-Derived DSM on Flat and Sloped Areas
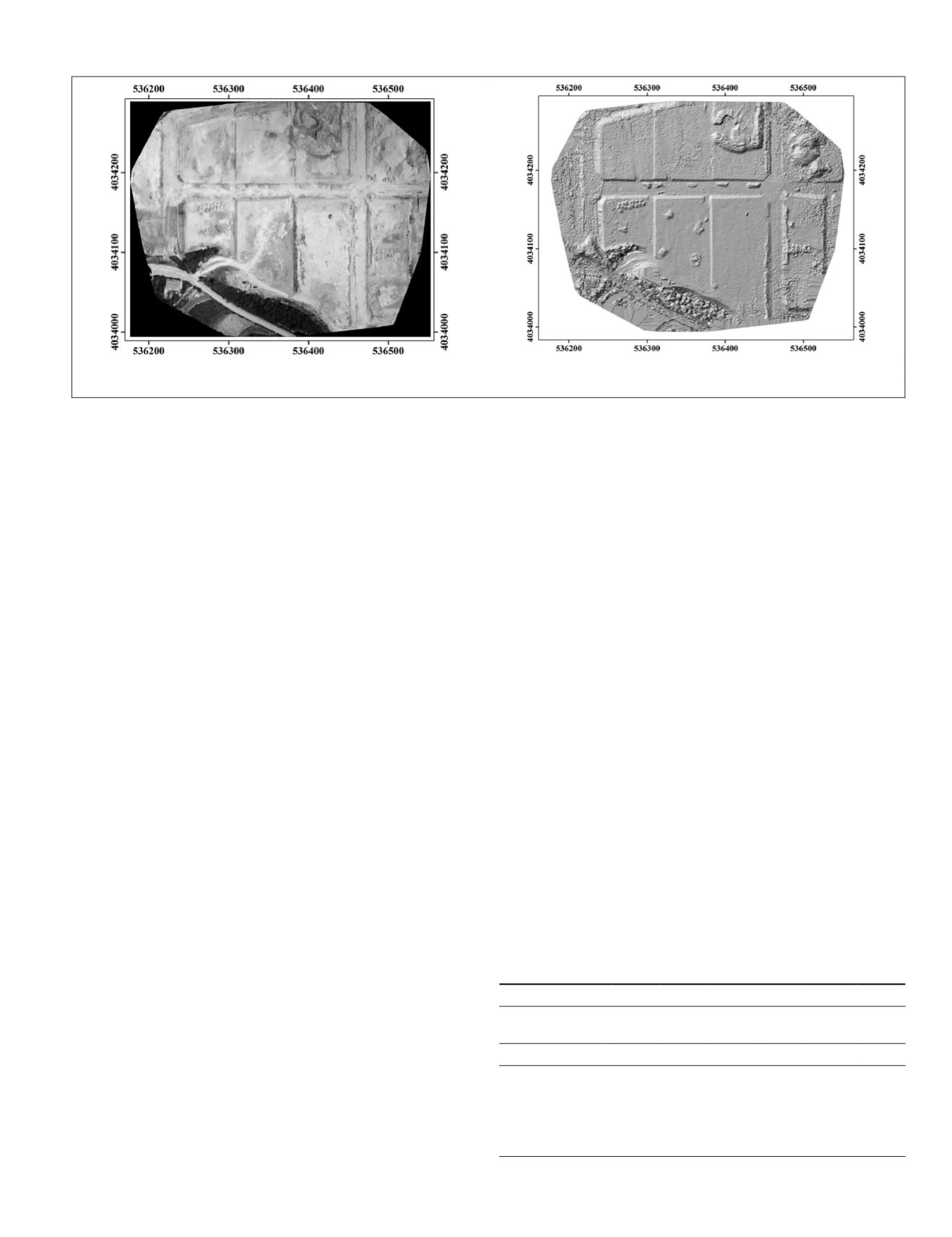
a) Orthomosaic image
(b) DSM
Figure 5. Orthoimages based on three-dimensional point-cloud data: (a) Orthomosaic image, (b) digital surface model.
Table 5. Ground-control-point (
GCP
) and checkpoint (
CP
)
accuracy in bundle block adjustment for each camera.
S7
NX
Shutter process
Rolling
option off
Rolling
option on
—
GCP CP GCP CP GCP CP
Root-mean-square
error (m)
0.033
0.030
0.015
Error X (m)
0.022 0.063 0.022 0.033 0.009 0.012
Error Y (m)
0.025 0.060 0.022 0.041 0.008 0.017
Error Z (m)
0.055 0.125 0.049 0.071 0.031 0.031
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
December 2019
893


