The Galaxy
NX
camera has the advantage of significantly
faster processing for off-line measurement applications. Each of
the cameras used in this study satisfied the resolution and pixel-
size requirements for generating
DSMs
using photogrammetry.
Generally, the complementary metal-oxide-semiconductor
sensors in smartphones cameras use nonlinear scanning
with an electronic rolling shutter. Rolling shutters can cause
undesirable effects, such as wobble from engine vibration and
skew as a result of speed (Wikipedia, no date). We devised
a mounting system with rubber bands to tightly attach the
camera onto the drone, so that no gimbal mount was used.
However, commercial gimbals are commonly used to me-
chanically minimize vibration or motion of cameras. Several
experiments confirmed that our mounting works. An ap-
plication capable of adapting to the ambient light level that
automatically generates images was also developed for both
cameras. The
NX
camera uses the Android operating system
and is able to adjust and adapt light influx, which modified
the sensitivity, shutter speed, and aperture of the Android
camera application programming interface.
UAV
Data Collection
The
UAV
was used to collect the image data on July 9, 2016.
Two sets of data were collected by installing the antivibration
mount in the center of the vehicle and mounting each of the
two cameras in turn (Figure 3 ). Approximately 80 images
were taken with settings of 80% overlap and 60% sidelap.
As shown in Table 2, the
UAV
maintained an altitude of 150
m following takeoff. The ground sample distance (
GSD
) values
were 4.49 cm for the S7 and 3.72 cm for the
NX
.
The time-lapse intervals were 4–5 and 5–6 s, for the smart-
phone and smart camera, respectively. The weather was clear
during the
UAV
flights, with visibility of approximately 16 km
and wind velocity of approximately 2 m/s. As shown in Table
2, exposure conditions were determined by the ambient light
level. The sensitivity setting was normal (
ISO
100–200) and
the f-stop value was approximately 2, despite the smart cam-
era’s larger value of 5. This was because the f-stop value is
proportional to the shutter speed. The images were unaffected
by blurring or wobble.
Lidar and Field Data Collection
In this study,
ALS
and
TLS
data were use
the study area, and the
DSMs
were used t
accuracy of the
UAV DSM
. The
ALS
survey
2016, by airplane. The
TLS
survey was o
the
GCP
measurements were made on July 9, 2016, immedi-
ately prior to the collection of the
UAV
image data.
The airborne laser measurement equipment used in this
study was a Leica Geosystems
ALS60
system, described in
Table 3. The
ALS60
has about a 40° field of view and a nominal
5 cm
GNSS
error. At 1,500–1,600 m above ground level, the
positional accuracy is 18 cm (edge
xy
), 9 cm (edge
z
), 15 cm
(nadir
xy
), and 8 cm (nadir
z
; Leica Geosystems, 2008).
A Topcon
GLS-1000
system (Tokyo, Japan) was used for
TLS
, and scans were performed at two stations to ensure the
accuracy of the
DSMs
across the study area. The
GLS-1000
’s
single-point accuracy is 4 mm at a distance of 150 m, and its
dual-axis angle accuracy is 6 in. (vertical, horizontal; Topcon,
2008). The raw scan data consisted of 3,739,257 points, which
included all signals reflected by the ground, objects, trees,
and grass. Superfluous data were discarded during process-
ing, and the final scan data set included 2,365,839 points. The
point density of the scan data set was 100 points/m
2
.
The point clouds generated at each station were converted
into object coordinates by registering the positional informa-
tion and georeferencing it against three
TLS
ground control
targets. The method of resection was used with three refer-
ence targets, and the reference targets were measured using
virtual reference-station real-time kinematics.
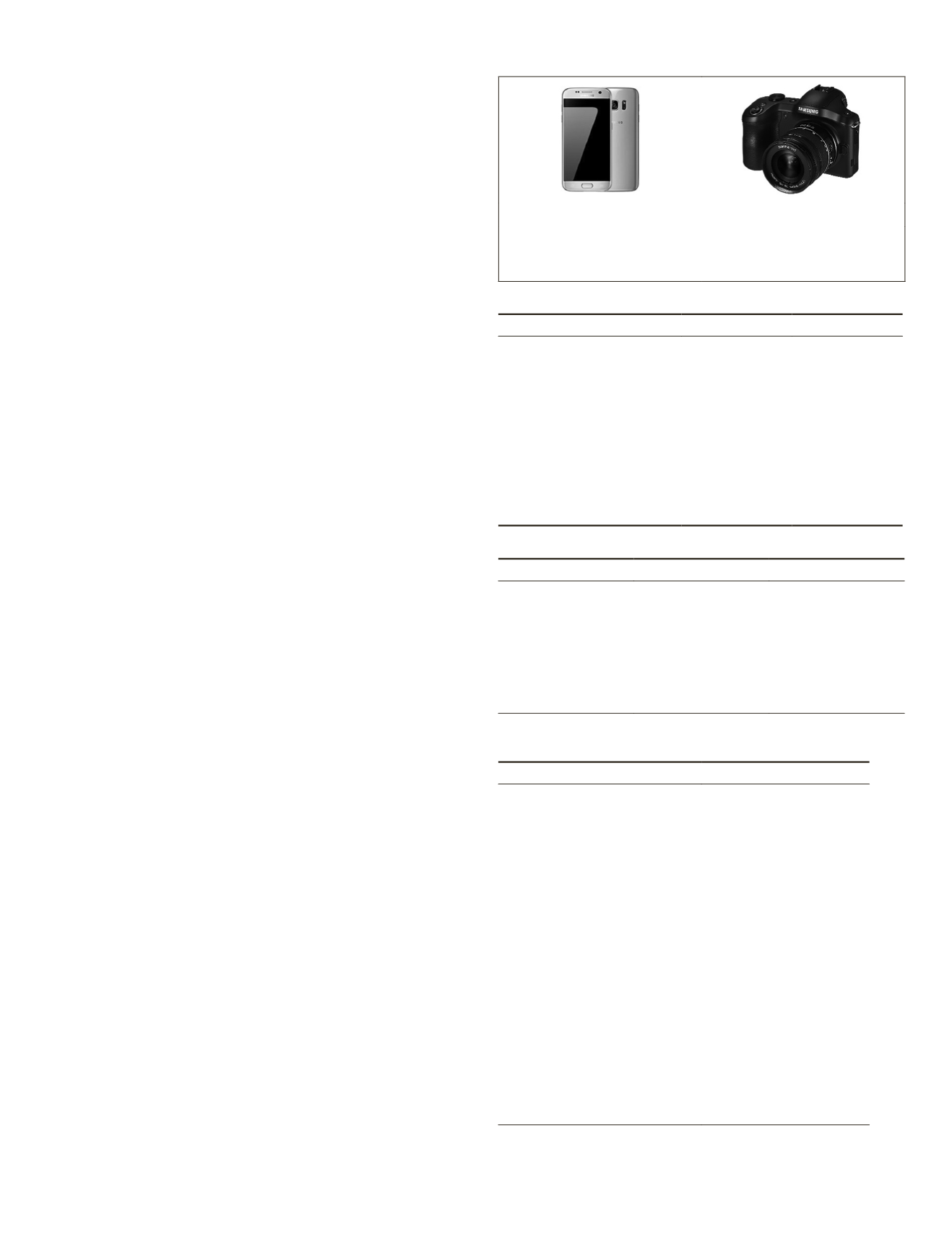
a) Samsung Galaxy S7 (b) Samsung Galaxy NX
Figure 3. The cameras attached to a
UAV
: (a) Smartphone
camera (Samsung Galaxy S7), (b) mirrorless camera
(Samsung Galaxy
NX
). © Samsung
Table 1. General specifications of cameras used.
Smartphone
Smart Camera
Camera name
S7
NX
Model name
SM-G930S
EK-GN120
Sensor width (mm)
5.645
23.333
Sensor height (mm)
4.234
15.555
Pixel size (µm)
1.400
4.264
Image width (pixels)
4,032
5,472
Image height (pixels)
3,024
3,648
Sensor maximum radius (mm) 3.528
14.021
Focal length (mm)
4.200
16.000
Minimum aperture
F/1.7
F/2.4
Table 2. Camera settings and environmental conditions.
Smartphone (S7)
Smart Camera (NX)
Total images
77
82
Wind direction
NNW
N
Start time
10:12:02
11:16:47
End time
10:15:05
11:20:09
Altitude (m)
150
150
Focal length (mm)
4.2/26
16/24
Shutter speed (s)
1/5,312–1/7,072
1/1,600
eica AL60 specifications and flight
Value
Altitude (m)
1,730
Average surface (m)
262
Flight speed (km/h)
217
Course interval (m)
260–340
Course overlap ratio (%)
50–60
Lidar laser frequency (Hz/s )
57.8
Scan angle (°)
+27 to −27
Swath on the ground (m)
750
Lidar maximum order
4th
Length interval (m)
0.49
Width interval (m)
0.96
Average density (/m2)
Upper 10
Date
3/15/2016
Visibility (km)
15
Wind speed (m/s)
1.9
Wind direction
WNW
Start time
10:54:23
End time
11:24:17
PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING
December 2019
891


